Boletín Upiita
CONTROL DE UN SERVOMOTOR CON UN ENCODER MECÁNICO ROTATORIO UTILIZANDO VHDL Y LA NEXYS II
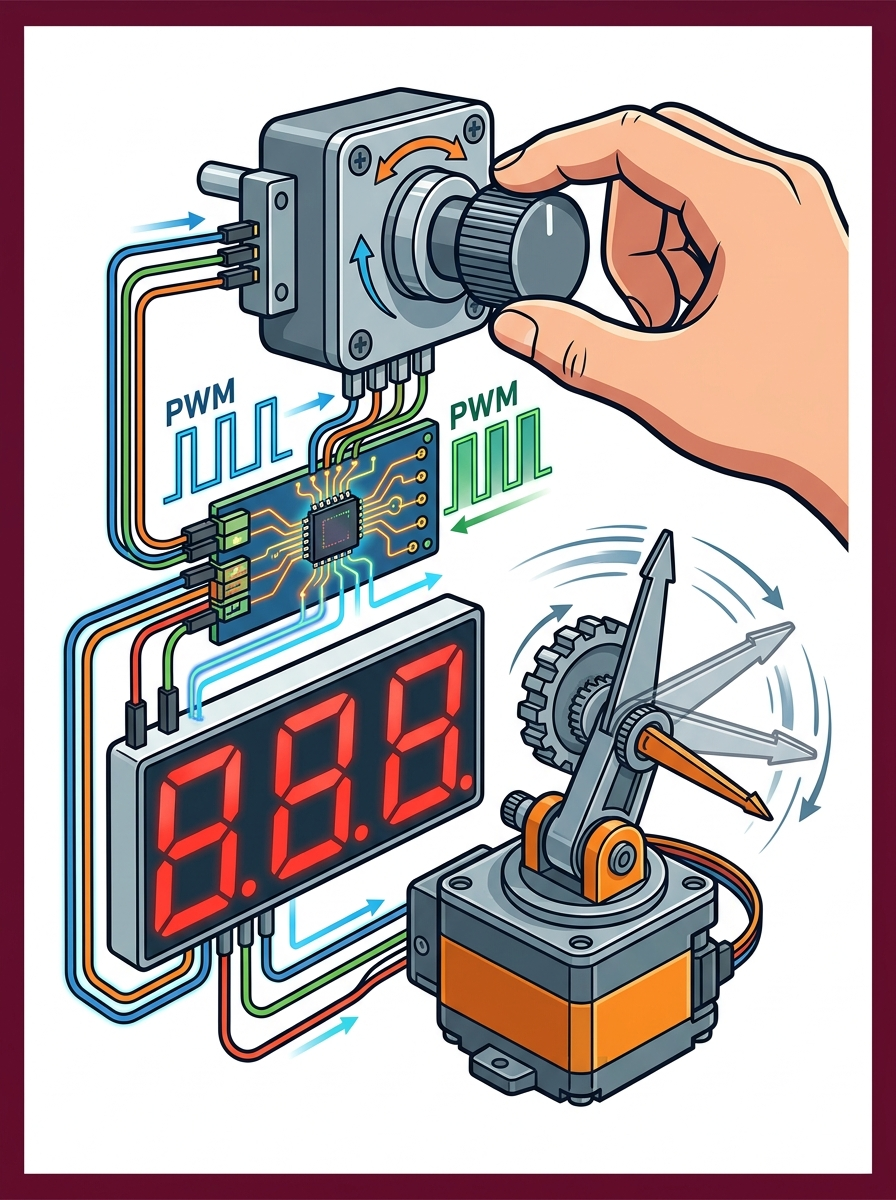
Se presenta un sistema de control de posición de un servomotor utilizando un encoder mecánico rotatorio y un display de 7 segmentos. El encoder modifica un PWM que controla la posición del servomotor.
Palabras clave:
encoder mecánico rotatorio
servomotor
VHDL
Nexys II
Leer artículo
Disponible para lectura en línea y descarga