Boletín Upiita
Modelo y simulación de prototipo para un robot móvil de tipo diferencial mediante SIMSCAPE
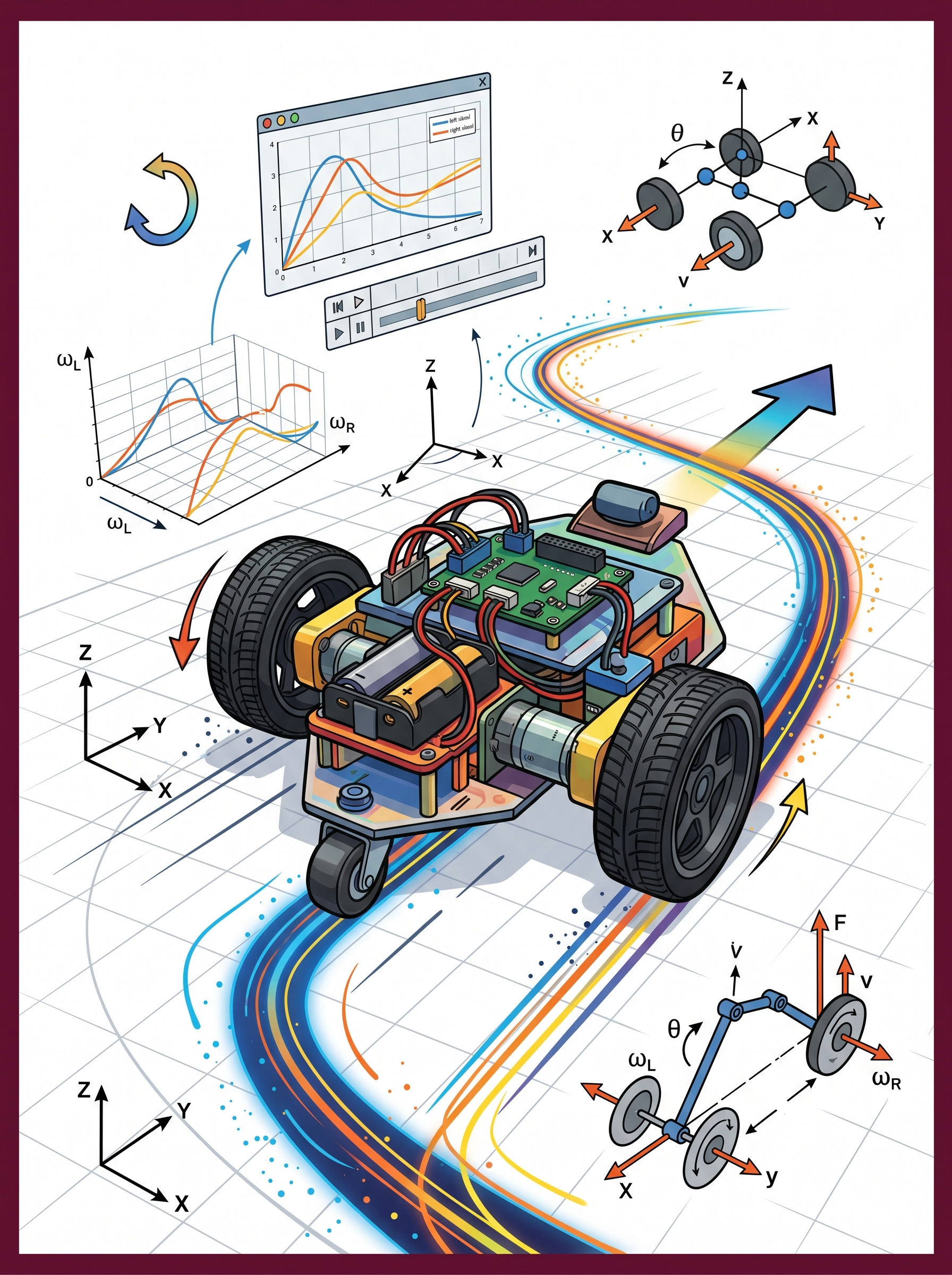
Se presenta el proceso de modelado y simulación de un prototipo de robot móvil con tracción diferencial utilizando Simscape-Multibody. La herramienta permite construir modelos y sistemas físicos mediante conexiones entre componentes, facilitando la simulación y animación de sistemas mecánicos en tres dimensiones.
Palabras clave:
Simscape Multibody
modelado
simulación
robot móvil
Leer artículo
Disponible para lectura en línea y descarga